
МЕТОДОЛОГІЧНІ ПІДХОДИ ЩОДО РАДІОЧАСТОТНОЇ КОРЕКЦІЇ РЕЗУЛЬТАТІВ ДИСТАНЦІЙНОГО ЗОНДУВАННЯ ПОСІВІВ, ОТРИМАНИХ ІЗ ДОПОМОГОЮ БПЛА
Актуальність. Революційні зміни в інформаційних технологіях та робототехніці впродовж останніх десятиліть призвели до появи серійних БПЛА, здатних вирішувати широкий спектр задач для потреб аграрного виробництва. Одним з найбільш перспективних напрямів використання БПЛА є дистанційне зондування рослинних насаджень для потреб раціонального використання добрив. У порівнянні із супутниковим та авіаційним моніторингом БПЛА мають принципові переваги не лише за точністю і вартістю моніторингу, а і можливості їх використання за низької хмарності, що є вкрай актуальним з огляду на потребу в оперативному моніторингу. У рослинництві БПЛА використовують для ідентифікацій проблем- них ділянок поля, контролю якості виконання польових робіт сільсько- господарською технікою тощо. Здійснюються спроби використання дронів для моніторингу стану мінерального живлення рослин на базі, так званих, вегетаційних індексів (ВІ), що обчислюються за кількісними характеристи- ками спектрів відбиття у певних частотних діапазонах. Складність вирішення цієї задачі пов’язана із потребою вимірів спектральних характеристик насаджень в умовах змінного освітлення, тобто здійснення радіочастотної (РЧ) корекції. На сьогодні існує кілька методичних підходів щодо радіочастотної корекції для БПЛА, їх оцінка та вибір оптимального рішення для обчислення ВІ і є метою нашої роботи.
Аналіз останніх досліджень та публікацій. ВІ використовуються із початку 70-х років після запуску в США програми супутникового моніторингу Landsat. Завдяки отриманому досвіду впровадження супутникових технологій моніторингу було продовжено і тому нині експлуатується кілька десятків супутникових платформ, котрі надають інформацію для більш ніж двохсот різних VegetationIndex (VI) [1]. Як правило, для РЧ корекції використовують оптичні еталони, в якості котрих виступають об’єкти на поверхні Землі із стабільними спектральними характеристиками: глибоководні водойми, дороги тощо. Проте для БПЛА із висотою польоту в кілька сотень метрів використання природних оптичних еталонів ускладнене, завдяки їх дефіциту на виробничих полях.
Апаратно вирішити проблему щодо змін освітлення пропонувалось із використанням додаткового спеціалізованого сенсора освітлення як доповнення до основного сенсора моніторингу. До таких відноситься датчик освітленості LightSensor від Micasense, котрий являє собою 5-ти смуговий сенсор, що підключається безпосередньо до камери MicaSenseRedEdge (камера спеціалізована для використаннях з платформи БПЛА). Дані динамічного калібрування від додаткового сенсору записується в метаданих, одержуваних TIFF зображень основного сенсора. JianfengZhou (2016) в [2] за використання такого обладнання отримав добру відтворюваність результатів, проте, таке рішення може використовуватись за щільної хмарності, чи за ясного неба. Якщо ж в небі присутні окремі хмари, зазначений варіант не підходить, що обмежує його використання.
Штучні наземні шаблони для проведення РЧ корекції використо- вуються найбільш часто, оскільки можливо отримати високу точність вимірів за відносно малої вартості обладнання. Проте збільшення точності вимагає використання різних шаблонів для різних частотних каналів вимірів. Так Haitao Xiang (2011) [3] для отримання індексів NDVI, GNDVI, RVI, GRI використовував 3 оптичні шаблони (використовувались саме 3 канали виміру). А Monica Herrero-Huerta (2014) [4] для підвищення точності вимірів ВІ використовувала 6 сірих шаблонів із різними відтінка- ми та 6 додаткових шаблонів різного кольору. Збільшення кількості шаблонів покращує точність отриманих даних, проте, використання цього підходу в промислових масштабах ускладнене з організаційних та фінансових причин. Слід відзначити, що для РЧ калібрування, зазвичай, використовують оптичні шаблони сірого кольору. При цьому градацію сірого підбирають емпірично під конкретну модель фотокамери. Сірий колір обирається тому, що його технологічно простіше отримати (барвники фарби є нестабільними). До того ж в суто білому та чорному шаблонах за певного освітлення поверхні сенсором фотокамери сприймаються відповідно як глянцеві та матові, що негативно впливає на точність радіочастотної корекції.
Досвід РЧ корекції освітлення для рухомого обладнання без використання оптичних шаблонів реалізовано в сенсорах GreenSeeker та CropCircle ACS-470 із використанням додаткового джерела опромінення [5]. До того ж за експлуатації GreenSeeker та CropCircle необхідно періодично здійснювати додаткове калібрування. У[6] для РЧ корекції також використовували додаткове джерело освітлення і для підвищення точності вимірів проводили серію знімків із різною тривалістю експозиції. Згідно запропонованої методики в розрахунках використовували meta дані із файлу exiff, що автоматично створюється за формування файлу зображення формату jpeg. Saberioona M. (2014) [7] висловив припущення про можливість використання службових даних фотокамери (файл exiff) для калібрування щодо змін освітленості. Проте досліди здійснювали впродовж одного дня 23.03.2013 о 9-30 ранку. При цьому параметри налагодження були встановлені камерою в автоматичному режимі. Цілком ймовірно, що в продовж дослідження зміни освітлення були не суттєвими, що дозволило отримати добру відтворюваність результатів. Тобто методика вимагає уточнення. Виходячи з вищезазначеного можна зробити такі висновки:
1) для виготовлення оптичних еталонів доцільно використо- вувати однотоні сірі панелі або панелі, поверхня котрих складається з ділянок, де кольори відповідають граничним значенням в адитивній моделі кольореутворення;
2) за РЧ корекції доцільно використовувати серію знімків із різними значеннями тривалості експозиції;
3) доцільно розглянути зв'язок між значеннями параметрів налагодження фотокамери з файлу exiff та отриманими результатами щодо інтенсивності складових кольору.
Мета дослідження – використання радіочастотної корекції результатів вимірювань інтенсивності складових кольору знімків у видимому спектрі рослинних насаджень, отриманих із використанням безпілотних літальних апаратів.
Матеріали та методи дослідження. Зразки. Для дослідів було використано зразки пшениці ярової сорту Елегія, що були вирощені впродовж 12.2016-02.2017 в умовах фітотрону, де були фізично змодельовані температуро-вологістний режим та освітлення, характерні для періоду «березень – травень» для Київської області. У період проведення досліджень зразки знаходились у стадії вегетації – вихід в трубку. Для проведення фотозйомки зразки були зрізані на 5-10 мм вище кореня. При цьому на рослинах були відсутні краплі води чи залишку ґрунту. Для експерименту брали зразки виключно з однієї посудини для запобігання похибок, пов’язаних із відмінністю кольорів зразків за рахунок різних умов їх живлення. За розміщення зразків на поверхні шаблону зберігали орієнтацію рослин, а дослідну ділянку вибирали саме із середньої частини рослин.
Відбивну панель (шаблон) для фотозйомки в умовах змінного освітлення виготовили з паперу, щільністю 80г/м2 . У процесі зйомки шаблон із зразками розміщували на пластиковій плиті білого кольору (для запобігання похибок, пов’язаних із впливом забарвлення підкладки за просвічування шаблону і використання сполоху). Для універсальності шаблону щодо природного освітлення було обрано схему з квадратів чорного та білого кольорів, розміри котрих становили 0,02×0,02 м. Габарити робочої частини шаблону становили 0,34×0,26 м і були достатніми для розміщення рослинного зразка повністю.
Спектральні сенсори оптичного діапазону. Для дослідів було вико- ристано стандартну цифрову камеру для БПЛА PHANTOM VISION FC200, а також фотокамери від смартфонів LenovoS660 та A1000. Використання смарфонів було обумовлено досвідом використання цього обладнання як дешевої альтернативи професійному обладнанню для розміщення їх на безпілотних літаючих платформах. Налагодження оптичних сенсорів полягало в коригуванні кількості випромінювання, що потрапляє на світлочутливу матрицю шляхом встановлення (зміни) терміну експозиції. Дані про стан діафрагми та тривалість експозиції, а також інші параметри налагодження отримували з файлу exiff, що утворювався автоматично при кожному вимірі. Експериментальні дослідження проводили в приміщені із комбінованим природнім та штучним освітленням (газорозрядні лампи). При зйомці параметр «баланс білого» у ручному режимі встановлювали значення – «ясна погода». Для камерS660 та A1000 використовували штатний сполох.
Обробка результатів. Для отримання значень інтенсивності складових кольорів зразків використовували програмне забезпечення LandDamageExpert(LDE) [8,9]. Програмне забезпечення LDE дозволяє визначати значення інтенсивності складових кольору пікселів зображення для адитивної 8-бітної колірної моделі RGB, в якій зображення отримують із комбінації трьох складових (червоної, зеленої та синьої). Кожна із складових RGB може змінюватись в діапазоні 0-255 умовних одиниць, що є фізичним обмеженням методики.
Результати досліджень та їх обговорення. Оптичний шаблон. На рис. 1 представлено залежності між відповідними складовими кольору дослідного зразка (пшениця) та білої частини оптичного шаблону. Як видно з представленої інформації, для FC200 та S660 за всіма трьома складовими кольору є добра відтворюваність. Експериментально отримані результати добре апроксимувались експоненціальними залежностями за винятком граничних ділянок, де інтенсивності складової кольору шаблону становить 255. Значення коефіцієнтів детермінації для цих результатів досліджень приведені в таблиці. Їх аналіз дозволяє зробити висновок про те, що використання шаблонів не позбавляє від необхідності калібрування конкретних зразків обладнання.
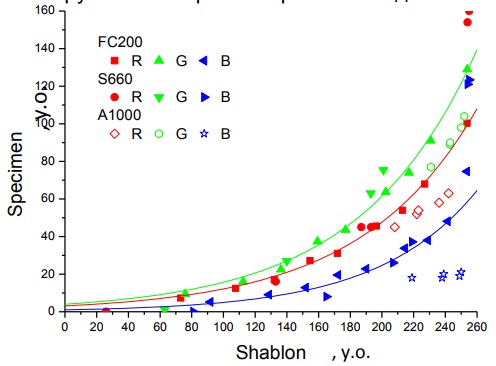
Рис. 1. Залежності інтенсивності складових кольору зразка (specimen) від відповідної інтенсивності шаблону (shablon)
Можливим поясненням різниці в результатах є використання різних алгоритмів перерахунку первісних даних за створення файлу зображення формату jpeg. Слід відзначити, що за корекції тривалості експозиції шляхом збільшення її тривалості за межами моделі виявилось до 40% результатів, що негативно впливає на точність вимірів.
Калібрування на основі тривалості приведеної експозиції. Калібрування базується на використанні службових даних про параметри налагодження фотоапарату, що отримують із службового файлу exif [10]. Величину приведеної експозиції обчислюють із залежності:
, (1)
де t – тривалість експозиції, сек;
еv – значення корекції експозиції.
На рис. 2 представлено отримані залежності між тривалістю приведеної експозиції та інтенсивністю складових кольору. На відміну від першого випадку, коли модель обмежена кольоровим простором шаблону, приведена тривалість експозиції має значно ширші межі, що дає можливість враховувати найбільш цінні дані за максимальних величин інтенсивності складових кольору.
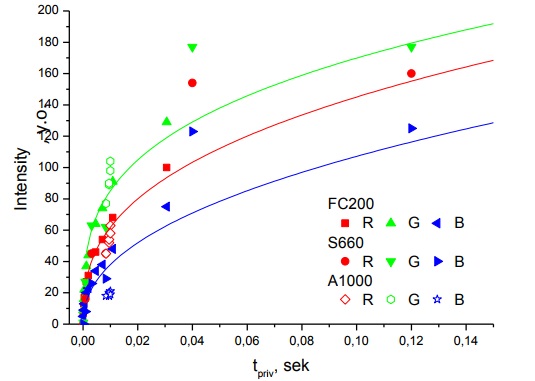
Рис. 2. Залежності інтенсивності складових кольору від величини приведеної експозиції
Отримані результати були апроксимовані простим ступневим рівнянням. Значення коефіцієнтів детермінації приведені в таблиці. За результатами аналізу матеріалів цього дослідження можна стверджувати, що таке калібрування у порівнянні із попереднім (за шаблонами) дає не гіршу збіжність результатів та більш широкі межі для застосування.
у збіжність результатів та більш широкі межі для застосування. Калібрування за величиною LightValue. Кількість світла, що потрапляє до світлочутливого елементу фотокамери можна коригувати, змінюючи величину діафрагми. На цьому принципі авторами пропо- нується здійснювати калібрування, використовуючи при цьому значення LightValue (LV), що розраховується за виразом:
На рис. 3 представлено результати досліджень залежності інтенсивності червоної складової від величини LV для різних фотокамер. Фотокамера FC200 для БЛА використовувалась виключно за природнього освітлення, а інші – за наявності сполоху.
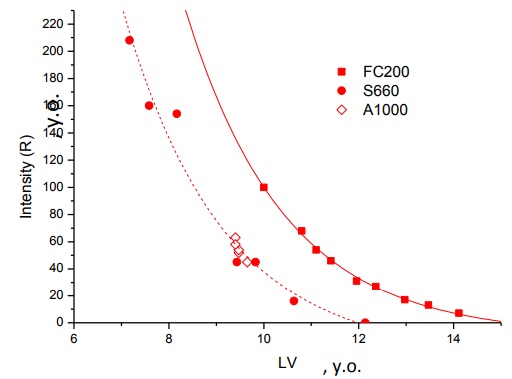
Залежність інтенсивності червоної складової кольору пшениці від величини LV
Відзначимо, що на відміну від попереднього способу, можна легко оцінювати дані, отримані і за меншої тривалості експозиції (максимальні значення LV). Ця особливість є важливою, виходячи з потреби у великій кількості знімків під час моніторингу полів з платформи БПЛА, враховуючи обмежений термін його польоту.
Висновки та пропозиції подальших досліджень. За використання оптичних шаблонів для моніторингу рослинних насаджень щодо стану їх мінерального живлення найбільш придатні R- та G- , у.o. , у.o. 76 складові. В-складова характеризується невеликим діапазоном вимірів і найгіршою збіжністю результатів (R2 - 0,41).
Калібрування на базі приведеної тривалості експозиції дає добру збіжність результатів за всіма складовими (R2 ≥ 0,94), проте, за недостатньої витримки можливі істотні похибки (EV ± 1).
Найвищу точність для всього діапазону корекції експозиції забезпе- чує отримана в результаті калібрування за величиною LightValue, за максимальної збіжності результатів (R2 ≥ 0,99), проте, калібрувальні за- лежності мають створюватись під конкретну марку обладнання (сенсору).
Список використаних джерел
1. Ahamed T., Tian L., Zhang Y., Ting K.C., “A review of remote sensing methods for biomass feedstock production”. Biomass & Bioenergy. vol. 35, №7, pp.2455-2469. July 2011
2. Jianfeng Zhou (2016) Evaluation of ground, proximal and aerial remote sensing technologies for crop stress monitoring // Jianfeng Zhou , Lav R. Khot, Haitham Y. Bahlol, Rick Boydston, Phillip N. Miklas. IFAC-PapersOnLine. Vol. 49, № 16, P. 22–26
3. Haitao Xiang (2011) An automated stand-alone in-field remote sensing system (SIRSS) for in-season crop monitoring // Haitao Xiang, Lei Tian. Computers and Electronics in Agriculture, Vol. 78, № 1, P.1-8
4. Monica Herrero-Huerta (2014) Vicarious radiometric calibration of a multispectral sensor from an aerial trike applied to precision agriculture // MónicaHerrero-Huerta, David Hernández-López, Pablo Rodriguez-Gonzalvez, Diego González-Aguilera, José González-Piqueras. Computers and Electronics in Agriculture, Vol. 108, P. 28-38
5. Qiang Caoa (2015) Active canopy sensing of winter wheat nitrogen status: An evaluation of two sensor systems // Qiang Caoa, Yuxin Miaoa, Guohui Fengc, Xiaowei Gaoa, Fei Lid, Bin Liua, Shanchao Yuea, Shanshan Chenga, Susan L. Ustine, R. Khoslaf. Computers and Electronics in Agriculture Vol. 112, P. 64-57
6. Методичні підходи для керування вибірковим внесенням добрив. / О. О. Опришко, І. М. Болбот, М. В.Андріїшина, Н. А.Пасічник // Аграрна наука і освіта. - 2008. - Т.9, № 3-4. - С. 100-104
7. Saberioona M. M. (2014) Assessment of rice leaf chlorophyll content using visible bands at different growth stages at both the leaf and canopy scale // M.M. Saberioona, M.S.M. Amina, A.R. Anuarb, A. Gholizadehc, A. Wayayokd, S. Khairunniza-BejodaSmart. International Journal of Applied Earth Observation and Geoinformation Vol.32 P.35–45
8. Визначення умісту гумусу в ґрунті неконтактними методами / С. Ю. Булигін, О. О. Опришко, Н. А. Гайбура, Д. І. Бідолах // Вісник аграрної науки. - 2005. - № 4. - С. 34-37
9. Опришко, О. О. Робототехнічний комплекс для культивації троянд / О. О. Опришко, Н. А. Пасічник, О. І. Бандурка // Науковий вісник НУБіП – 2012. – Вип. 170. Ч. 1. – С. 262-267
10. Оперативное дистанционное зондирование посевов как инструмент для программирования урожая. / В. Ф. Лысенко., А. А. Опрышко, Д. С. Комарчук, Н. А. Пасичник // Вестник БГТУ, 2016. – №2. – С.144-148.